
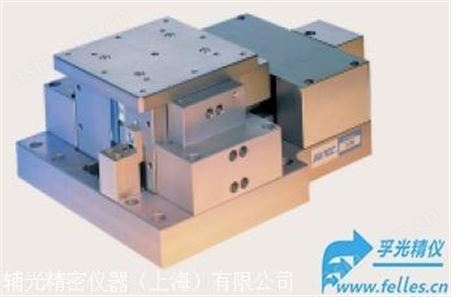
這款二維線性XY平移臺是采用光學編碼器的電控高精度直驅平移臺,提供零反沖高精度平移運動,非常適合用作二維載物臺等重復性掃描定位平移應用。
二維線性XY平移臺采用線性非接觸式光學編碼器作為反饋系統,使得位置控制高達亞納米級分辨率。
二維線性XY平移臺采用自然老化鋁合金確保了平移臺高溫穩定性和輕巧性,以及優良的長周期運動,導軌系統不會發生漂移。
二維線性XY平移臺可以用于潔凈空間環境或真空度10^-3Torr的真空環境,也可根據用戶要求提供高真空直驅平移臺。
二維線性XY平移臺可以輕松地直接連接到光學平臺上,可直接安裝搭建成電動XY二維平移臺,無需使用任何連接板,也可按要求提供垂直Z軸平移臺。
二維線性XY平移臺還可以安裝到花崗巖龍門架或高精度平臺上實現高精度平移定位。

二維線性XY平移臺特點
剖面超薄設計
分辨率高達1nm
直接驅動無返程系統
高分辨率非接觸式光學編碼器
高精度線性導向和運載系統
速度高達1200mm/s
超長使用壽命
方便集成到各種平臺或光學機械系統中
二維線性XY平移臺規格參數
| 型號 | 8MTLF250XY-2L-2U-4LEn1 | 8MTLF250XY-1L-2U-3LEn1 | 8MTLF250XY-2L-1U-3LEn1 | 8MTLF250XY-1L-1U-2LEn1 |
| 運動學部分參數 | ||||
| 行程范圍 | 250 x 250mm | |||
| 編碼器類型 | 光學編碼器 | |||
| 編碼器型號 | LEN1 | |||
| 編碼器分辨率 | 25nm~5μm (任意數據由用戶) | |||
| 編碼器接口 | 差分接口RS422 | |||
| 內部放大器 | YES | |||
| 放大系數 1) | 4-200 (按要求提供) | |||
| 編碼器光柵周期 | 20μm | |||
| 參考標記 | Yes | |||
| 精度 2) | ||||
| 校準前, | ±5μm | ±6μm | ||
| 校準后, μm | ±1.5μm | ±2μm | ||
| N/A | ||||
| 雙向重復定位精度(peak-peak)2) | ±0.25μm | ±0.5μm | ||
| 雙向重復定位精度(RMS) 2) | ±0.15μm | ±0.30μm | ||
| Pitch 3) | ±30 / ±6.20 μrad / arcsec | |||
| Yaw 3) | ±30 / ±6.20 μrad / arcsec | |||
| Roll | N/A | |||
| 速度(負載4kg) 4) | <1500mm/s | |||
| 加速度(負載4kg) 5) | <20000mm/s2 | |||
| 限位開關類型(Safety) | Hall Sensors | |||
| 限位開關極性(Safety) | Pushed is closed | |||
| 限位開關電壓 | 5…24V | |||
| 負載和導向部分參數 | ||||
| 位移臺類型 | Real Gantry (MIMO) | Planar-Gantry Hybrid | Planar | |
| 線性電機型號 | LM5 | |||
| 線性電機類型 | Ironless BLDC motor | |||
| Bus Voltage | >300VDC | |||
| 電機數量 | 4 | 3 | 2 | |
| 負載 (中心位置加載) 6) | ||||
| 水平負載 | 30kg | |||
| 豎直負載 | N/A | |||
| 運動質量 7), | ||||
| X (底部), kg | 39.1kg | 37.8kg | 34.4kg | 33.9kg |
| Y (上部), kg | 7.5kg | 7.1kg | 7.5kg | 7.1kg |
| 導向系統 | Recirculating linear rails and carriages units with caged balls
| |||
| Material & Environment Conditions | ||||
| Housing Material | Aluminum Alloy | |||
| Housing Coating (Finish) | Black Anodizing | |||
| Environment Pressure | Normal Atmosphere | |||
| Operating Temperature, °C | 20±2 | |||
| Control, Communication and Cabling | ||||
| Recommended Controllers 8) | ACS Products Line or 8SMC5-USB series | |||
| Recommended Drivers 8) | ACS Products Line or 8SMC5-USB series | |||
| Recommended Power Supply 9) | 2 phase / 3 phase source | |||
| Recommended Communication Interface 12) | EtherCAT / RS232 / USB / TCP-IP | |||
| Cable Length, m | 2 (other by request) | |||
| Differential Outputs 10) | On request | |||
| Accessories Information | ||||
| Base Plate for Mechanical Interface | Granite is recomended | |||
| Z Configuration | Not available (choose from other Standa stages series)
| |||
| Additional Details | ||||
| Dimensions of Moving Platform (W x L), mm | 430 x 430 | |||
| Overall Linear Stage Dimensions (W x L x H), mm | 746 x 746 x 106 | |||
| Measurement System | Metric/Imperial | |||
| Orthogonality11), μrad / arcsec | 24 / 5 | |||
| Protection Level | Request support | |||
| RoHS | Compliant | |||
| Weight, kg | ~68 | |||
1) 默認為x4轉PPR-脈沖數/每轉,模擬SIN/COS編碼器接口
2)精度和雙向重復定位精度采用Zygo ZMI 501 Michelson laser interferometer測量計算
3) Pitch & Yaw 采用 11D-ALI-OL 電子自相關儀器測試,電子自相關儀11D-AL-COL分辨率1μrad. 環境誤差1μrad.
4) 速度由編碼器限制和驅動器CUT-OF頻率以及導向系統限制.
5)加速度由驅動器“Peak Current, Motors` Peak Current and External Load (inertia)決定.
6)負載能力由導向系統決定.
7) 運動質量是系統常數m0,通常是沒有負載時的慣性。
8) 推薦的控制器和驅動器有助于發揮電動平移臺的性能.
9) 推薦的電源是根據用戶的占空比和負載來選擇.
10) 差分輸出接口,可提供主動或被動LCMv2接口.
11) 可組成正交性能更好的XY二維電動位移臺系統.
12) 標量控制可采用USB / TCP-IP / RS-232通訊接口,矢量控制建議采用EtherCAT接口。
13) 平移臺包括特殊封蓋,可用于灰塵嚴重或濕度較大的環境。









所有評論僅代表網友意見,與本站立場無關。